S2K Commerce - Products Dropdown
- ${title}
S2K Commerce - Shopping Cart
- ${title}
S2K Commerce - Order Entry
- ${title}
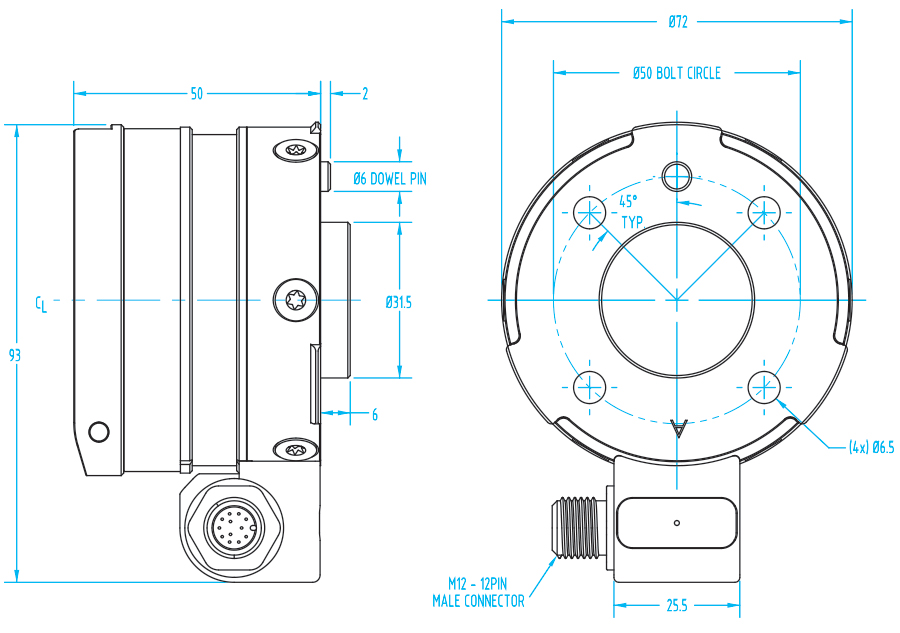
8223 OnRobot Hex-E QC Force/Torque Sensor for Collaborative Robots
OnRobot’s 6-axis force torque sensor provides an accurate force and torque measurement along all 6 axes. This gives you precise control when it comes to difficult jobs. Additionally, the HEX software includes path recording, force control (on UR and Kuka) and special features for insertion tasks (UR only). This means reduced integration time for your production line. The sensors are designed to fit most of the current industrial robot arms.








In the Plastic Injection Molding Industry, the HEX F/T sensor is used to teach your robot the exact location, force and speed of operations such as insert-loading an degating of larger gates.
- Weight: 0.347kg / 0.76 lbs
- Plastic applications include degating, and insert loading using the advanced control and force feedback.
- Other common applications are polishing, sanding, deburring, grinding and assembly, but it can also be used for teach-in and crash detection.
- Requires a Compute Box to use with OnRobot Grippers.
- NOT compatible with dual quick changer (single EOAT's only).
- Unique optical based technology.
- Keeps constant force while moving.
- Easy to use interface, no programming skills are needed (UR only).
- High accuracy.
- Integrated software.
| Technical data | Fx / Fy | Fz | Tx / Ty | Tz |
|---|---|---|---|---|
| Nominal capacity (N.C.) | 200 N | 200 N | 10 Nm | 6.5 Nm |
| Single axis deformation at N.C. (typical) | +/- 1.7mm | +/- 0.3mm | +/- 2.5mm | +/- 5mm |
| Single axis overload | 500% | 500% | 500% | 500% |
| Signal noise* (typical) | 0.035 N | 0.15 N | 0.002 Nm | 0.001 Nm |
| Noise-free resolution (typical) | 0.2 N | 0.8 N | 0.01 Nm | 0.002 Nm |
| Full scale nonlinearity | < 2% | < 2% | < 2% | < 2% |
| Hysteresis (measured on Fz axis, typical) | < 2% | < 2% | < 2% | < 2% |
| Crosstalk (typical) | < 5% | < 5% | < 5% | < 5% |
* Signal noise is defined as the standard deviation (1σ ) of a typical one second no-load signal.
| Operating Conditions | |
|---|---|
| Power supply | 7V — 24V |
| Current consumption | 0.8W |
| Operating temperature | 32°F — 131°F |


Built into every OnRobot gripper, the EOAT Side Quick Changer is now available for all EOAT which makes it easy to click into your cobot. With a 20kg payload, this quick changer is a simple way to swap your EOAT in between applications.

The RG2 gripper is an adaptive gripper packed with features that make it the ideal gripper for Collaborative applications. It includes a built-in Quick Changer, adjustable stroke and grip force, finger tips, and software that makes it easy to use.

VG10 is an Electric Vacuum EOAT that requires no additional cables, tubes or manifolds. It has two vacuum channels that make it ideal for plastic part handling, packaging operations and a variety of Collaborative Applications away from your pneumatic source.
See our wide variety of vacuum cups or contact us if you need a recommendation.

OnRobot’s RG6 adaptive gripper is a powerful adaptive gripper with features that make it the ideal gripper for Collaborative and Industrial Applications. It includes a built-in Quick Changer, adjustable stroke and grip force, finger tips, and software that makes it easy to use.

The Pneumatic SGP High Precision Gripper Kit for Industrial Cobots by EMI is a double-acting parallel gripper ideal for high precision applications such as insert loading or pick-and-place applications that require a high level of accuracy. With blank finger-mounting jaws, the possibilities are virtually endless with the ability to use custom fingers that fit your exact application.
This gripper kit was designed for Universal Robots but EMI can supply a kit complete with interface plates, and quick changers for your Sawyer, Kuka, Fanuc, or other Collaborative Robot.


The SXT gripper kit uses a concentric, powerful 3-jaw gripper ideal for machine tending and general handling of cylindrical workpieces. Made out of high-quality machined components with an IP67 protection class, the SXT Gripper is ideal for a variety of industrial applications.
EMI’s pre-assembled SXT Gripper Kit is easy to set-up, operate and maintain. The included URCap makes the installation and programming simple and intuitive for all users. Simply connect your 6mm compressed air line, connect your 4-wire cable to the controller box, install EMI’s URCap on your UR and your Gripper Kit is ready to go.


The Pneumatic SX Gripper Kit by EMI offers the ideal solution for part handling, machine tending and secondary operations in Collaborative Industrial Robot applications. Designed to offer adjustability and durability while maintaining the ease of use that is expected in most Cobot applications.
This gripper kit was designed for Universal Robots but EMI can supply a kit complete with interface plates, and quick changers for your Sawyer, Kuka, Fanuc, or other Cobot.


The Pneumatic MAG Gripper Kit for Industrial Cobots by EMI is a pneumatically-driven industrial magnetic gripper ideal for insert loading as well as handling of ferromagnetic workpieces in Collaborative Industrial Robot applications.
The MAG Gripper Kit offers customization with the ability to mount custom-made nests and sensors to make sure the part is picked, held and placed accurately. This gripper kit was designed for Universal Robots but EMI can supply a kit complete with interface plates, and quick changers for your Sawyer, Kuka, Fanuc, or other Collaborative Robot.

Organize and secure pneumatic and electric lines running down your robot arm. Clamps have (4x) channels for tubing and cables up to 8mm diameter. Kit includes 2 clamps, one 12in. strap, and one 18in. strap that fit most Collaborative Robots.

EMI's Solenoid Valve Kit for Collaborative Robots is an essential add-on for all pneumatic applications. This powerful 5-port/2-position valve enables you to actuate Single Acting (NO/NC) and Double Acting end effectors while using a single Digital Output and compressed air line.

The OnRobot Angle Bracket enables you to attach tools at a 90 degree angle to the robot flange. This improves the tools ability to fit into tight spaces and it can lower the risk of the robot arm going into singularity.