S2K Commerce - Products Dropdown
- ${title}
S2K Commerce - Shopping Cart
- ${title}
S2K Commerce - Order Entry
- ${title}
OnRobot Adaptive Grippers Cobots

OnRobot grippers are adaptive grippers packed with features that make them an ideal gripper for Collaborative applications. They includes a built-in Quick Changer, adjustable stroke and grip force, finger tips, and software that makes it easy to use.
Seamlessly click the gripper into the Robot Side Quick Changer, Dual Quick Changer or Hex Force/Torque Sensor QC. They are compatible with a wide variety of cobots using the wrist connector or Compute Box.
Shown to the right, EMI offers custom fingers with soft-touch flocking. Contact EMI about 3D printed fingers, and read more about our 3D Printing options here.


Seamlessly click it into the Robot Side Quick Changer, Dual Quick Changer or Hex Force/Torque Sensor QC. Compatible with a wide variety of cobots using the wrist connector or Compute Box.
See Q#8202 for a larger version of this gripper with all the same features and up to 10kg of payload.
- Weight: 0.78kg / 1.72 lbs
- Ideal for insert loading applications.
- Internal or external gripping.
- Grip indications (part detection).
- Infinite rotation on UR3 only – cable connection turns with gripper.
- May require a Compute Box with some Robot models.
- Customizable fingers; If custom finger tips are required, view our 3D printing page and contact us!
- Automatic tool center point (TCP) calculation, automatic depth compensation, and automatic payload calculation for UR.
- Integrated software
- +/-90° Angular adjustments built into device in 30° Increments.
| Technical data | |
|---|---|
| Max. Payload with stock fingers | 2kg (4.4lbs) |
| Max. Payload with custom EMI fingers | 5kg (11lbs) |
| Total stroke with stock fingers (adjustable) | 110mm (4.33in) |
| Finger position resolution | +/- 0.1mm |
| Repetition accuracy | +/-0.1mm — 0.2mm |
| Reversing backlash | +/-0.1mm — 0.3mm |
| Gripping force (adjustable) | 3N — 40N |
| Gripping force deviation | +/-25% |
| Gripping speed* | 38mm — 127mm /second |
| Gripping time** | 0.06s — 0.21s |
| Adjustable bracket tilting accuracy | less than 1° |
| Storage temperature | 32° — 122°F |
*See Gripping Speed tab.
** based on 8mm total movement between fingers. The speed is linearly proportional to the force. For more details see Gripping Speed tab.
| Operating Conditions | |
|---|---|
| Power supply | 20V — 25V |
| Current consumption* | 70mA — 600mA |
| Operating temperature | 41° — 122°F |
*Current spikes up to 3A (max 6mS) may occur during the release action.


With an adjustable stroke of 160mm, the RG6 can pick up a wide variety of items. This flexible all-around gripper can help you broaden the scope of applications you can automate, from machine tending and pick & place to assembly and packaging & palletizing. Seamlessly click it into the Robot Side Quick Changer, Dual Quick Changer or Hex Force/Torque Sensor QC. Compatible with a wide variety of cobots using the wrist connector or Compute Box.
See Q#8201 for a more compact version of this gripper with all the same features and lighter payload.
- Weight: 1.25kg / 1.76 lbs
- Internal or external gripping.
- Grip indications (part confirmation).
- May require a Compute Box with some Robot models.
- Automatic tool center point (TCP) calculation, automatic depth compensation, and automatic payload calculation for UR.
- Customizable fingers. If custom finger tips are required, view our 3D printing page and contact us!
- Integrated software.
- +/-90° Angular adjustments built into device in 30° Increments.
| Technical data | |
|---|---|
| Max. Payload with stock fingers | 6kg (13.2lbs) |
| Max. Payload with custom EMI fingers | 10kg (22.04lbs) |
| Total stroke with stock fingers (adjustable) | 160mm (6.3in) |
| Finger position resolution | +/-0.1mm — 0.004in |
| Repetition accuracy | +/-0.1mm — 0.2mm |
| Reversing backlash | +/-0.1mm — 0.3mm |
| Gripping force (adjustable) | 25N — 120N |
| Gripping force deviation | +/-25% |
| Gripping speed* | 51mm — 160mm /second |
| Gripping time** | 0.05s — 0.15s |
| Adjustable bracket tilting accuracy | less than 1° |
| Storage temperature | 32° — 122°F |
*See table on Gripping Speed tab.
** Based on 8mm total movement between fingers. The speed is linearly proportional to the force. For more details see Gripping Speed tab.
| Operating Conditions | |
|---|---|
| Power supply | 20V — 25V |
| Current consumption* | 70mA — 600mA |
| Operating temperature | 41° — 122°F |
*Current spikes up to 3A (max 6mS) may occur during the release action.


The new OnRobot Soft Gripper is available with three interchangeable silicon-molded cups to handle a wide array of items.
- Weight: 0.77kg / 1.69lbs
- Smart lock tool mechanism and Quick Changer base included
- Maximum payload of 2.2 kg depends on shape, softness, and friction of items to be handled, and grip dimensions range from 11mm to 118mm, depending on cup used.
- IP 67 Classification
- Silicone rubber is FDA 21 CFR 177.2600* & EC 1935/2004 approved
- The gripper comes with pre-integrated software that is easy to install and program.
| Technical data for Soft Gripper Base | |
|---|---|
| Stroke | 11 — 40mm (0.43 — 1.57in) |
| Spindle force | 380N |
| Spindle speed | 37mm/s (1.46in/s) |
| Gripping time* (SG-A-H) | 32 grip/min |
| Power supply | 20 — 25V |
| Current consumption | 45 — 600 mA |
| Operating temp for base | 32° — 122°F |
| Operating temp for silicone | -4° — 176°F |
*The gripping time is tool depended. For more details see OnRobot Datasheet.


Accomplish more with customizable fingertips to flexibly grip a wide range of part sizes and shapes, Contact EMI! The gripper comes with pre-integrated software that is easy to install and program.
Seamlessly click it into the Robot Side Quick Changer, Dual Quick Changer or Hex Force/Torque Sensor QC. Compatible with a wide variety of cobots using the wrist connector or Compute Box.
- Weight: 1.15kg / 2.5lbs
- Internal or external gripping.
- Infinite rotation on UR3 only – cable connection turns with gripper.
- May require a Compute Box with some Robot models.
- Customizable fingers; If custom finger tips are required, view our 3D printing page and contact us!
- Automatic tool center point (TCP) calculation, automatic depth compensation, and automatic payload calculation for UR.
- Integrated software
| Technical data | |
|---|---|
| Max. Payload with Force fit fingers | 10kg (22lbs) |
| Max. Payload with custom Form Fit EMI fingers | 15kg (33lbs) |
| Grip diameter* external | 4mm — 152mm (0.16 — 5.98in) |
| Grip diameter* internal | 35mm — 176mm (1.38 — 6.93in) |
| Diameter repetition accuracy | 0.1mm — 0.2mm |
| Gripping force | 10N — 240N |
| Gripping force (adjustable) | 3 — 100% |
| Gripping speed (diameter change) | 125mm |
| Gripping time** (including brake activation) | 500ms |
*With the scope of delivery.
**10mm diameter distance. Also see Finger movement and force note.
| Operating Conditions | |
|---|---|
| Power supply | 20V — 25V |
| Current consumption* | 43mA — 1500mA |
| Operating temperature | 41° — 122°F |
*600 mA set as default.


The Soft Gripper operates without an external air supply, for no additional costs or complexity, and none of the dust or noise generated by traditional vacuum grippers.


The Soft Gripper operates without an external air supply, for no additional costs or complexity, and none of the dust or noise generated by traditional vacuum grippers.


The Soft Gripper operates without an external air supply, for no additional costs or complexity, and none of the dust or noise generated by traditional vacuum grippers.


Features:
- Reliable gripping with variable force.
- Built-in proximity sensor to automatically detect the workpiece.
- Includes exchangeable fingertips for handling cylindrical objects.
- Includes protective pads (shown above).
- Safe, consistent grip even after power loss.
- Integrated software.
- No compressed air needed.
Technical Specs:
- 800g (1.763lb)
- Payload: 0.002-22.046 lb (0.001-10 kg)
- Workpiece size: ∅65.4mm (∅2.574 in)
- Gripping time: 300 ms
- IP Classification: IP67


- Workpiece is held in the event of powerloss
- IP67 Classification
- Clean Room Rated: ISO Class 5
- Weight: 1.1kg / 2.4lb
- Includes an extra bellow
2FG7 Specifications:
| Technical data | Min | Typical | Max |
|---|---|---|---|
| Payload force fit | - | - | 7kg / 15.5lbs |
| Payload form fit | - | - | 11kg / 24.3lbs |
| Total stroke (adjustable) | - | 38mm / 1.49in | - |
| OD Grip Range with stock fingers | 1mm | - | 73mm |
| ID Grip Range with stock fingers | 11mm | - | 83mm |
| Repetition accuracy | - | 0.1mm / 0.004in | - |
| Gripping force* | 20N | - | 140N |
| Gripping force tolerance | +/-5% N | ||
| Gripping speed** | 16mm/second | 450mm/second | |
| Gripping time (including brake activation)*** | - | 200ms | - |
| Storage temperature | 0°C / 32°F | 60°C / 140°F |
*The required current is 2000 mA, less current will result in less gripping force. See the Force vs Current Graph.
**Relatively from the gripping object (both arms).
***At 4 mm stroke and 80 N. The typical value is 300 ms at 40 mm and 80 N.
| Operating Conditions | Min | Typical | Max |
|---|---|---|---|
| Power supply | 20V | 24V | 25V |
| Current consumption | - | - | 2000mA* |
| Operating temperature | 5°C / 41°F | - | 50°C / 122°F |
| Calculated MTBF (operating life) | 30,000 hours | - | - |
* Automatically adapts to the current requirements when UR CB3 tool connector is used (600mA).


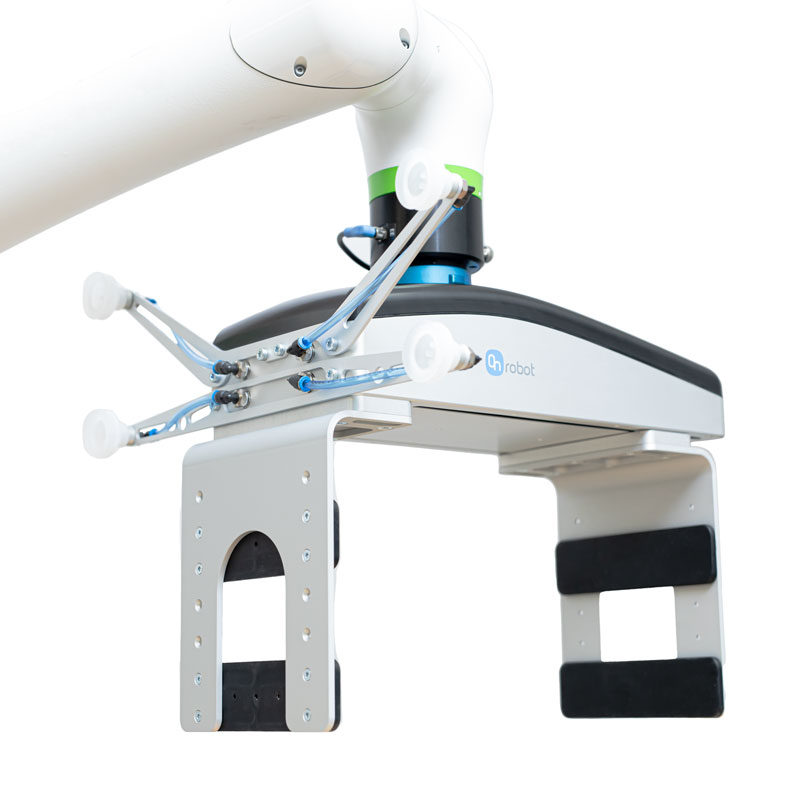
- Highly versatile palletizing gripper with wide stroke and customizable arms handles heavy or open boxes, shelf-ready products and other containers that can’t be gripped with vacuum
- Integrated vacuum gripper handles slip sheets without changing the gripper or requiring other handling method
- Off-the-shelf gripper saves significant engineering effort and shortens deployment time
- Electric gripper offers fast out-of-the-box deployment without the complexity and costs of external air supply
- Gripper will hold workpiece in case of powerloss
- Integrated electric BLDC motor included
- Vacuum unit includes integrated 50μm field replaceable dust filters
- IP 54 Classification
- Base unit weight with standard fingers and pads: 5.07kg (11.18 lb)
- Base unit weight with standard fingers, pads and all vacuum equipment: 5.34kg (11.77 lb)
| Finger Grip Properties | |
|---|---|
| Max. Payload | 20kg (44.1lbs) |
| Total Stroke | 260mm (10.24in) |
| Grip width range (1) | 170mm — 430mm (6.69 — 16.93in) |
| Gripping repeatability | +/- 0.5mm (0.0197in) |
| Gripping force (2) | 80 — 400N |
| Gripping force tolerance | +/- 30N |
| Gripping speed (3) | 16 — 180 mm/s |
| Gripping time (including brake actuation) | 600ms |
| Noise level (finger gripper) (4) | 58 [dB(A)]Leq 63[dB(A)]Max |
| Noise level (vacuum gripper) (4) | 72 [dB(A)]Leq 74[dB(A)]Max |
(1)When pads are mounted, the minimum value is 158mm and the maximum value is 418mm. (2)See Force vs Current Graph in the next tab. (3)At 6mm stroke and 150N. The typical value is 900ms at 20mm and 200N. (4)The noise level of the 2FGP20 depends on whether the finger or vacuum gripping part is used. Vacuum gripping noise depends on the set vacuum level and whether an object is picked up or not. Higher speed and stroke increase the noise. The noise level also depends on the surroundings and other equipment.
| Vacuum Grip Properties | |
|---|---|
| Vacuum | 5 — 60% Vacuum (-0.05 — -0.607 Bar)(1.5 — 17.95 inHg) |
| Air flow | 0 — 12 L/min |
| Max. payload (with delivered attachments) | 2.5 kg (5.51 lb) |
| Vacuum cups | 1 — 4 |
| Typical gripping time (measured with vacuum target 40%) | 0.25 s |
| Typical release time | 0.4 s |
| Operating Conditions | |
|---|---|
| Power Supply | 20 — 25 V |
| Current consumption | 2000 mA |
| Operating temperature | 5 —50 °C (41 — 122 °F) |
| Relative humidity (non-condensing) | 0 — 95% |

- Workpiece is held in the event of powerloss
- IP67 Classification
- Clean Room Rated: ISO Class 5
- Weight: 1450g / 3.2lb
- Includes an extra bellow
2FG14 Specifications:
| Technical data | Min | Typical | Max |
|---|---|---|---|
| Payload force fit | - | - | 14kg |
| Payload form fit | - | - | 20kg |
| Total stroke (adjustable) | - | 50mm | - |
| OD Grip Range with stock fingers | 5mm | - | 55mm |
| ID Grip Range with stock fingers | 17mm | - | 67.6mm |
| Repetition accuracy | - | 0.1mm / 0.004in | - |
| Gripping force* | 40N | - | 280N |
| Gripping force tolerance | +/-10% N | ||
| Gripping speed** | 16mm/second | 100mm/second | |
| Gripping time (including brake activation)*** | - | 200ms | - |
| Storage temperature | 0°C / 32°F | 60°C / 140°F |
*The required current is 2000 mA, less current will result in less gripping force. See the Force vs Current Graph.
**Relatively from the gripping object (both arms).
***At 4 mm stroke and 80 N. The typical value is 300 ms at 40 mm and 80 N.
| Operating Conditions | Min | Typical | Max |
|---|---|---|---|
| Power supply | 20V | 24V | 25V |
| Current consumption | - | - | 2000mA* |
| Operating temperature | 5°C / 41°F | - | 50°C / 122°F |
| Calculated MTBF (operating life) | 30,000 hours | - | - |
* Automatically adapts to the current requirements when UR CB3 tool connector is used (600mA).
