S2K Commerce - Products Dropdown
- ${title}
S2K Commerce - Shopping Cart
- ${title}
S2K Commerce - Order Entry
- ${title}
8202 OnRobot RG6 Adaptive Gripper for Collaborative Robots
OnRobot’s RG6 adaptive gripper is a powerful adaptive gripper with features that make it the ideal gripper for Collaborative and Industrial Applications. It includes a built-in Quick Changer, adjustable stroke and grip force, finger tips, and software that makes it easy to use.

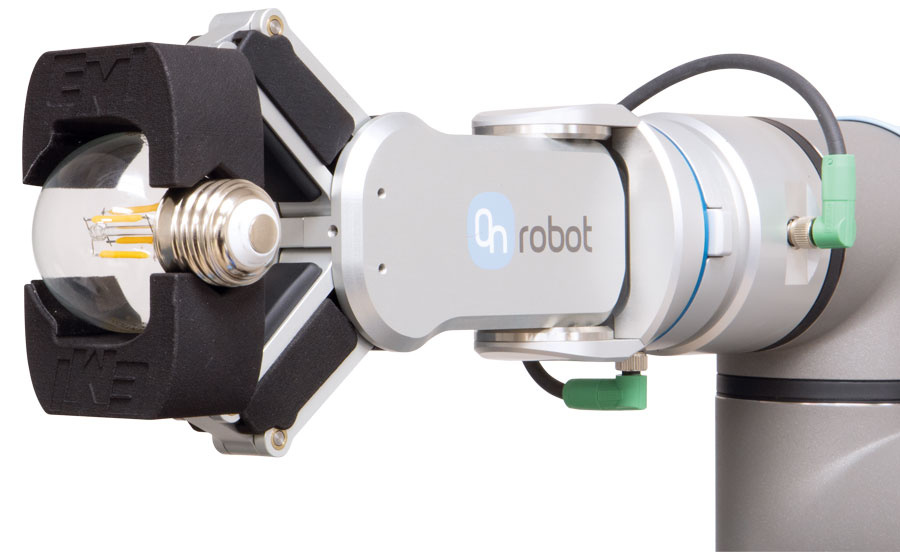




With an adjustable stroke of 160mm, the RG6 can pick up a wide variety of items. This flexible all-around gripper can help you broaden the scope of applications you can automate, from machine tending and pick & place to assembly and packaging & palletizing. Seamlessly click it into the Robot Side Quick Changer, Dual Quick Changer or Hex Force/Torque Sensor QC. Compatible with a wide variety of cobots using the wrist connector or Compute Box.
See Q#8201 for a more compact version of this gripper with all the same features and lighter payload.
- Weight: 1.25kg / 1.76 lbs
- Internal or external gripping.
- Grip indications (part confirmation).
- May require a Compute Box with some Robot models.
- Automatic tool center point (TCP) calculation, automatic depth compensation, and automatic payload calculation for UR.
- Customizable fingers. If custom finger tips are required, view our 3D printing page and contact us!
- Integrated software.
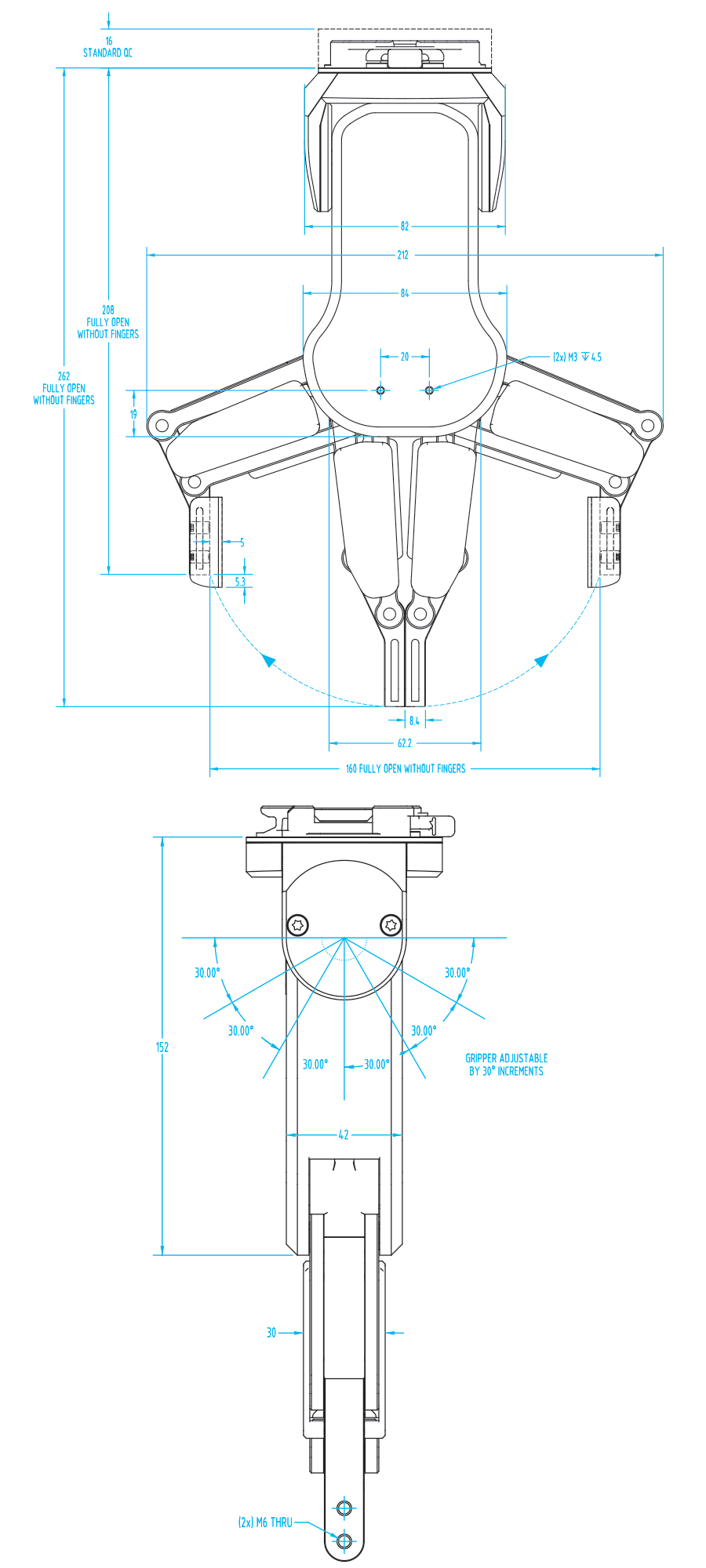
- +/-90° Angular adjustments built into device in 30° Increments.
| Technical data | |
|---|---|
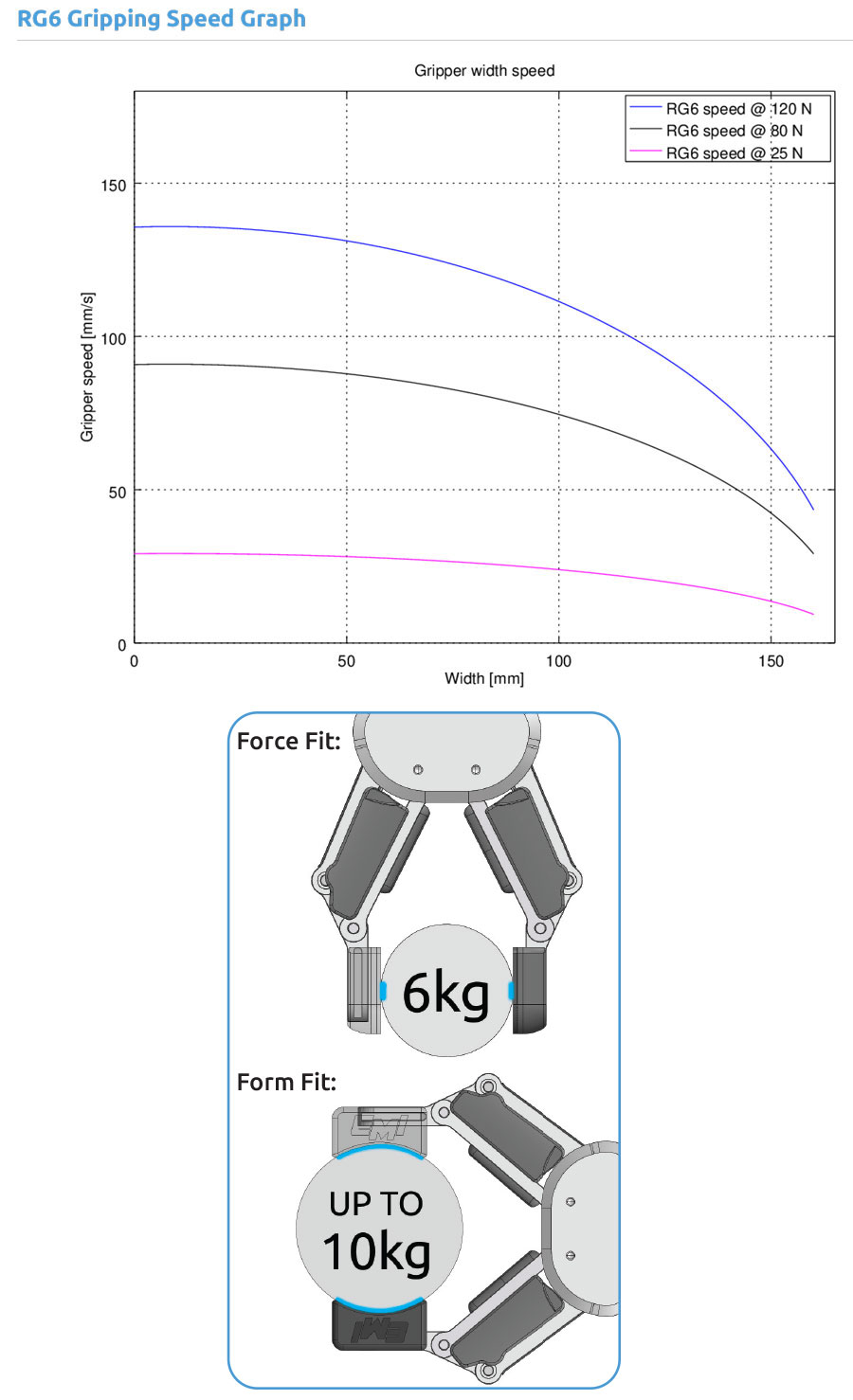
| Max. Payload with stock fingers | 6kg (13.2lbs) |
| Max. Payload with custom EMI fingers | 10kg (22.04lbs) |
| Total stroke with stock fingers (adjustable) | 160mm (6.3in) |
| Finger position resolution | +/-0.1mm — 0.004in |
| Repetition accuracy | +/-0.1mm — 0.2mm |
| Reversing backlash | +/-0.1mm — 0.3mm |
| Gripping force (adjustable) | 25N — 120N |
| Gripping force deviation | +/-25% |
| Gripping speed* | 51mm — 160mm /second |
| Gripping time** | 0.05s — 0.15s |
| Adjustable bracket tilting accuracy | less than 1° |
| Storage temperature | 32° — 122°F |
*See table on Gripping Speed tab.
** Based on 8mm total movement between fingers. The speed is linearly proportional to the force. For more details see Gripping Speed tab.
| Operating Conditions | |
|---|---|
| Power supply | 20V — 25V |
| Current consumption* | 70mA — 600mA |
| Operating temperature | 41° — 122°F |
*Current spikes up to 3A (max 6mS) may occur during the release action.


Built into every OnRobot gripper, the EOAT Side Quick Changer is now available for all EOAT which makes it easy to click into your cobot. With a 20kg payload, this quick changer is a simple way to swap your EOAT in between applications.

OnRobot’s 6-axis force torque sensor provides an accurate force and torque measurement along all 6 axes. This gives you precise control when it comes to difficult jobs. Additionally, the HEX software includes path recording, force control (on UR and Kuka) and special features for insertion tasks (UR only). This means reduced integration time for your production line. The sensors are designed to fit most of the current industrial robot arms.

Direct OEM replacement of the padded fingers that come pre-installed on OnRobot’s Q#8202 RG6 Adaptive Gripper. Contact EMI if you need custom finger tips designed and 3D printed.

With Wingman automatic tool changers, your cobot will have the flexibility to deploy more tools, solve more tasks and generate more output in your production. This tool changer kit has everything you need to get started.

With Wingman automatic tool changers, your cobot will have the flexibility to deploy more tools, solve more tasks and generate more output in your production.

The OnRobot Angle Bracket enables you to attach tools at a 90 degree angle to the robot flange. This improves the tools ability to fit into tight spaces and it can lower the risk of the robot arm going into singularity.



The Dual Quick Changer enables you to use two end-of-arm tools together in a single cycle. With this innovative solution you can use two grippers or vacuum units. Quickly and seamlessly switch between tools to maximize the utilization of your robots.
New 4.5A Unit

Gen III SmartShift with a vacuum EOAT that requires electrical connection, pneumatics and a vacuum-actuated soft gripper. Tool pockets and framing can be built around your specific application.
SmartShift automatic tool changers feature a clutch-driven engagement that enables mechanical, pneumatic and optional electric connections. No need for compressed air or electricity for coupling, and available as a kit or a la carte, in two different payload capacities. Automatic Tool Changers require some level of added integration, and we encourage you to partner with our EOAT Engineers to ensure a seamless implementation.

Gen III SmartShift with a vacuum EOAT that requires electrical connection, pneumatics and a vacuum-actuated soft gripper. Tool pockets and framing can be built around your specific application.
SmartShift automatic tool changers feature a clutch-driven engagement that enables mechanical, pneumatic and optional electric connections. No need for compressed air or electricity for coupling, and available as a kit or a la carte, in two different payload capacities. Automatic Tool Changers require some level of added integration, and we encourage you to partner with our EOAT Engineers to ensure a seamless implementation.

SmartShift HD63: Higher payload and added safety features!
The HD63 version uses the same principle as the standard (Gen III) SmartShift and even uses the same pneumatic and electrical accessories. Here are a few features that set it apart and make it suitable for higher payload applications. Automatic Tool Changers require some level of added integration, and we encourage you to partner with our EOAT Engineers to ensure a seamless implementation.